
This is the second post in a thread introducing matroids. In the last post, we looked at how matroids arise as a natural object in topological graph theory. Now we’re going to attack matroids from the angle of linear algebra. All the while, we’ll push the concepts back into the world of graphs to see what kind of insight this new angle can give us.
Cryptomorphism
That’s a fun word but what does it mean? Essentially it means two systems of axioms are equivalent in the following sense: The objects that satisfy one set of axioms are in one-to-one correspondence with the objects satisfying the other set of axioms, in some kind of ‘natural’ way.
Before we jump back into matroids, one example you might be familiar with is that of topological spaces. Normally, we define a topological space in terms of open sets:
Let 


- Both
are open.
- The arbitrary union
of open sets
is open.
- The intersection
of finitely many open sets
is open.
But we could equally-well define a topological space as follows: A topological space is a pair 

- Both
- The arbitrary intersection
of closed sets
- The union
These two defintions don’t formally define the same object, but they define equivelent (spiritually the same?) objects in some sense. There is a one-to-one correspondence between spaces defined both ways; we can move easily between them. In particular, a set is closed if and only if its complement is open. This is a cryptomorphism.
Matroids exhibit a multitude of cryptomorphic defintions. In fact, one of the reasons matroids were first studied was as a means of studying equivalence of axiomatic systems.
In the previous post, we saw the following definition for matroids in terms of their ‘circuits’:
A matroid 


- (C0) No
is empty;
- (C1)
- (C2) For distinct
and
, there is a circuit
s.t.
but
.
The last condition is called circuit elimination. Subsets of
But we could have just as well stated the definition in terms of ‘bases’. This next definition will help us understand why matroids are a kind of generalisation of linear algebra.
Bases
A matroid 

- (B1) There is at least one base. That is,
;
- (B2) For distinct
and
, there is an element
s.t.
is a base.
The last condition is called basis exchange and is inspired by the properties of bases from linear algebra. We can get between the cryptomorphic defintions in the following way:
Given a matroid axiomatised in terms of circuits (minimally dependent sets), we obtain bases as the maximally independent (circuit-free) sets. Given a matroid axiomatised in terms of bases, we obtain circuits as the minimally dependent sets.
Like in a vector space, we can prove that all bases in a (finite) matroid have the same size.
Recall that, from a matroid 

It sounds like “matrix”
As you might expect, the independent and dependent collections of vectors in a vector space satisfy the axioms of a matroid. In fact, we can be a little bit broader with this. If we take a matrix 

Now we have a way to express elements of non-graphic matroids. Remember that a graphic matroid is a matroid on the edge set of a graph, whose circuits are the cycles of the graph. In particular, recall the forbidden minors from Tutte’s characterisation of graphic matroids:

None of these matroids are graphic, but the matroid 


Graphic matroids are representable as matrices over any field. Given a graph 









How about 



It turns out that 

This is a strange phenomenon and it brings us to our next section.
Representability
We say that a matroid
It turns out that the matroids representable over
Similarly, the ternary matroids, those representable over 

The matroids representable over every field are called regular matroids and it turns out that regular matroids are exactly those which are both binary and ternary. Therefore, the regular matroids are characterised by the forbidden minors:

These kind of representability results are tied together into Rota’s Conjecture below. It is sometimes seen as the matroid-theoretic counterpart to graph theory’s Robertson-Seymour Theorem.
Rota’s Conjecture – For any finite field
In 2013, Geoff Whittle announced that he, along with Jim Geelen and Bert Gerards, had solved Rota’s conjecture. The result has yet to be published.
While I’d like to dive further into the representability of matroids, I’ll leave this here and maybe come back to it in a future post.
Rank
What other ideas from linear algebra can we import into matroid theory? Well, since for a finite matroid, all of its bases have the same size, we automatically get a notion of ‘dimension’. We call this size value the rank of a matroid 
We can extend this notion of rank to a function on all subsets of the ground set. Indeed, for a matroid 


For matroids that come from vector spaces, the rank of a subset is the dimension of the subspace generated by that set.
We even get a cryptomorphic definition of matroids via the rank function:
A matroid 

- (R1) For all subsets
;
- (R2) Rank is submodular. That is, for any subsets
, we have
;
- (R3) Rank is monotonic. That is, for any subset
.
The rank of a matroid 

Rank allows us to define another familiar structure! We get the analogues of linear subspaces, hyperplanes. In matroid-land, these are called flats and are the subsets of the ground set

Let’s bring it back to graphs
What role does rank play in the cycle matroids of graphs? It seems like a strange property to try and query graphs about, but it turns out to make some graph definitions more elegant.
Recall that the bases of a cycle matroid of a connected graph 

From this, the flats of a graph
This is cool but not particularly enlightening. What is more interesting, is when we look at graph connectivity in terms of matroids…
Let 

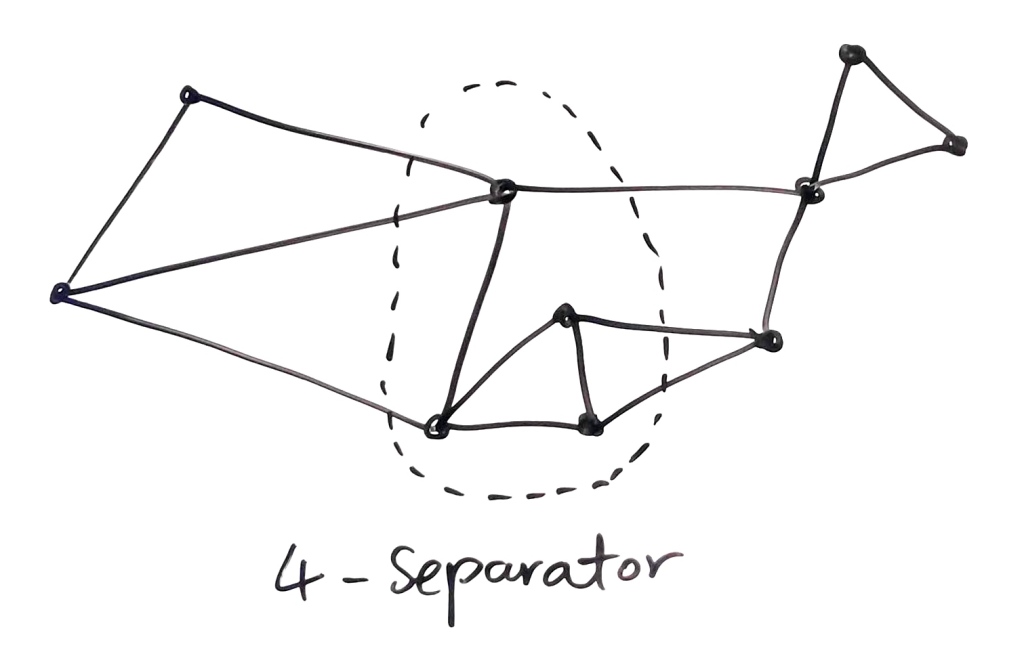
In the spirit of matroids, let’s try and rewrite this in terms of edges. How about:
Let 

Now, these definitions aren’t one-to-one (a separation gives a unique (minimal) separator but not always vice versa) but they’re close enough for our purposes. Indeed, the definitions of k-connected coincide (at least when there are sufficient vertices involved).
We can lift the separation defintion straight to matroids using rank. Indeed, for a set of edges in a cycle matroid, rank counts one less than the number of vertices incident with those edges.
Let 
As you would expect, k-separations of cycle matroids correspond to k-separations of the graphs that generated them (except when the original graph is not connected). As such, lots of graph-connectivity results generalise to matroids. We can even define tree-decompositions (and thus treewidth) of matroids using this machinery!
That’s the end of this post for now, but I hope to explore this all again in detail soon.

Leave a comment